First of all I’m a huge fan of verge3D!
I’m still a beginner and am trying to recreate the tutorial with the industrial robot with my own robot.
Now I would like to implement the control via the inverse kinematics so that I can control the robot via the workpiece/tool on it.
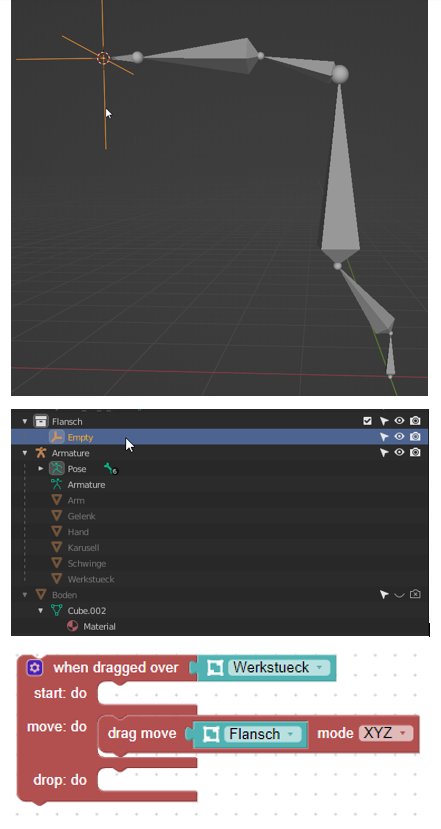
It already works completely in Blender, if I move the “Flansch” mesh there, then the robot adapts accordingly.
I would like to have this function in the web browser as well. I solved it using the puzzle pieces as follows(see the image). If I move the work piece (Werkstuek), then the mesh “Flansch” should move in XYZ and consequently the whole robot.
Unfortunately nothing is moving at the moment.
Is inverse kinematic already implemented in Verge3D?
And if so, how do you do it right?
Is there a tutorial or guide somewhere?
 .
.